【コード解説・PyTorch】手話認識入門15 - 様々な改善手法6: ノイズ付加によるデータ拡張
こんにちは.高山です.
先日の記事で告知しました手話入門記事の第十五回になります.
今回は手話動画から抽出した追跡点系列に対して,データ拡張を施すことで認識性能を改善する手法を紹介します.
ただし,今回紹介する手法はこれまで紹介してきたデータ拡張と異なり,劣化させたデータを学習することで認識モデルの頑健性を向上させるアプローチになります.
具体的には,手話中の追跡点系列の座標値に対してノイズを加えることで,特徴量の分散を増やします.
図1にノイズ付加の適用例を示します.
骨格追跡は,画像の解像度や明暗に影響を受けやすく,座標値が安定しない場合があります.
また,MediaPipeの全身追跡機能には複雑さの異なる3種類のモデルがあり,軽量モデルは他のモデルに比べて追跡点が細かく振動する現象が発生します.
このような現象はジッタ (Jitter) と呼ばれます.
図1(b) に示すように追跡点系列にノイズを加えることで,ジッタが発生している状況をシミュレーションすることが可能です.
(顔はかなり崩れてしまっていますが)
今回解説するスクリプトはGitHub上に公開しています.
複数の実験を行っている都合で,CPUで動かした場合は結構時間がかるのでご注意ください.
1. 概要
1.1 今回説明する内容
実装の詳細に先立って,今回紹介する内容の概要を説明したいと思います.
図2は,先日の記事で説明した機械学習モデル構築のワークフローの何処が今回の説明箇所に該当するかを示しています.
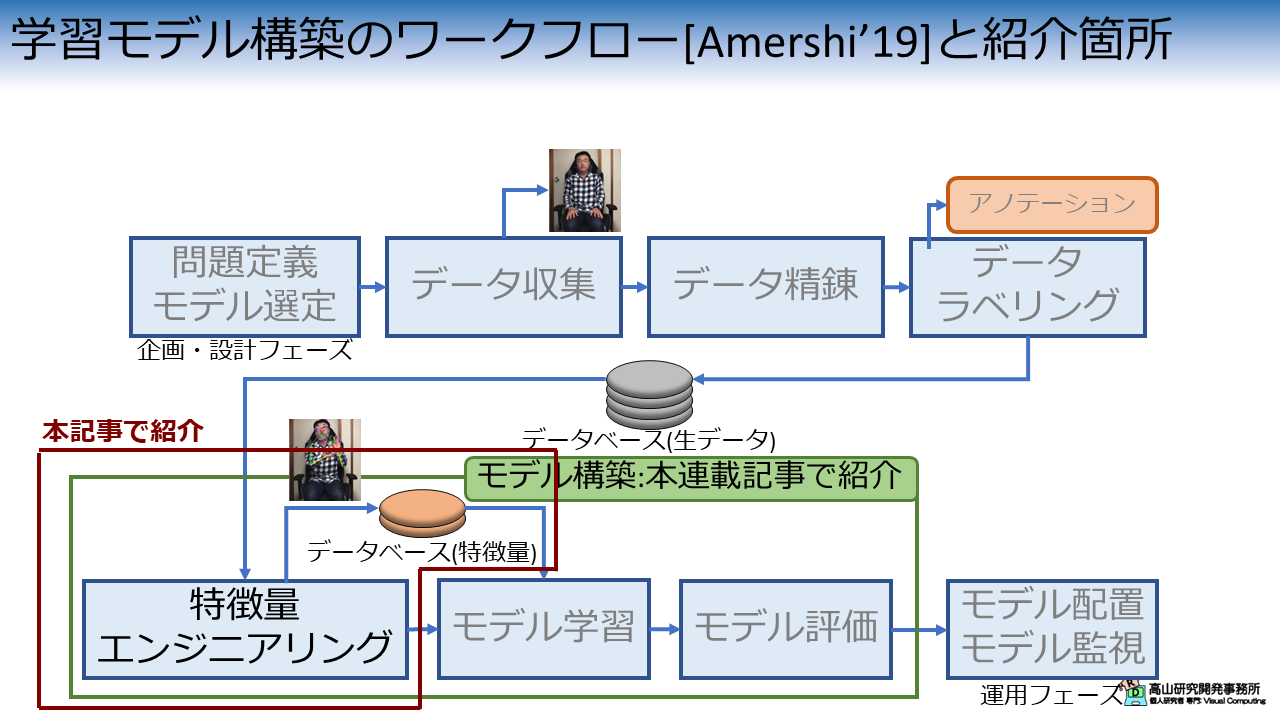
今回説明するデータ拡張は,学習用データセットからデータを取り出す際に行う,前処理に該当します.
特徴量エンジニアリングとデータ拡張の関係については,第一回の記事 (第1.2項と第1.3項) または第十一回の記事 (第1.1項) をご参照ください.
- [Amershi'19]: S. Amershi, et al., "Software Engineering for Machine Learning: A Case Study," IEEE/ACM ICSE-SEIP 2019.
1.2 ノイズ付加の処理工程
図3に,追跡点系列へのノイズ付加処理工程を示します.
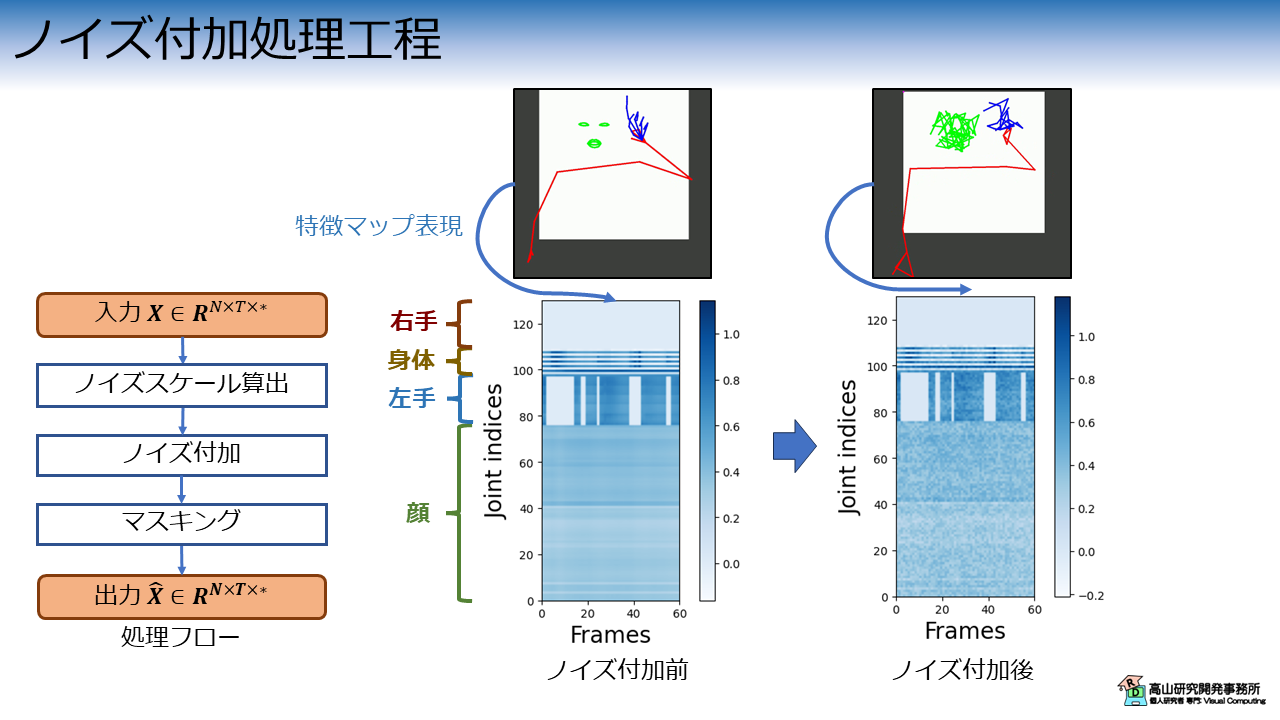
処理は非常にシンプルで,ノイズスケールの算出とノイズ付加操作,およびマスキングから構成されます.
ノイズは一様分布やガウス分布など用いて,ランダムに値を生成することで作ることができます.
ノイズスケールは分布の幅を決めるパラメータ (例えば,ガウス分布の場合は標準偏差です) で,スケールをサンプル毎にランダムに決定することで様々な量のノイズを付加することができます.
マスキングは,追跡に失敗している点に加わったノイズを除去する操作です.
図3右側は,ノイズ付加前後の画像フレームと特徴マップを示しています.
ノイズの効果が分かりやすいように,ここでは大きめのノイズスケールを与えています.
画像フレームを見ると,ノイズ付加後は最早どのような手話をしているか判別できないほどに崩れています.
一方,特徴マップ上では大まかな特徴を保てていることが分かります.
認識モデルが実際に見ているのは特徴マップなので,このようなデータを入力しても上手く学習してくれます.
逆に言うと,画像フレームに示しているような情報を内部で生成して処理するわけではないので注意してください (そのような認識アプローチも実はあります [Duan'22]).
- [Duan'22] H. Duan., et al. "Revisiting Skeleton-based Action Recognition," CVPR 2022.
1.3 先に結果
第2節以降では,いつも通り実装の紹介をしながら実験結果をお見せします.
コード紹介記事の方針として記事単体で全処理が分かるように書いており,少し長いので結果を先にお見せしたいと思います.
図4は,データ拡張がある場合と無い場合の,Validation Lossと認識率の推移を示しています.
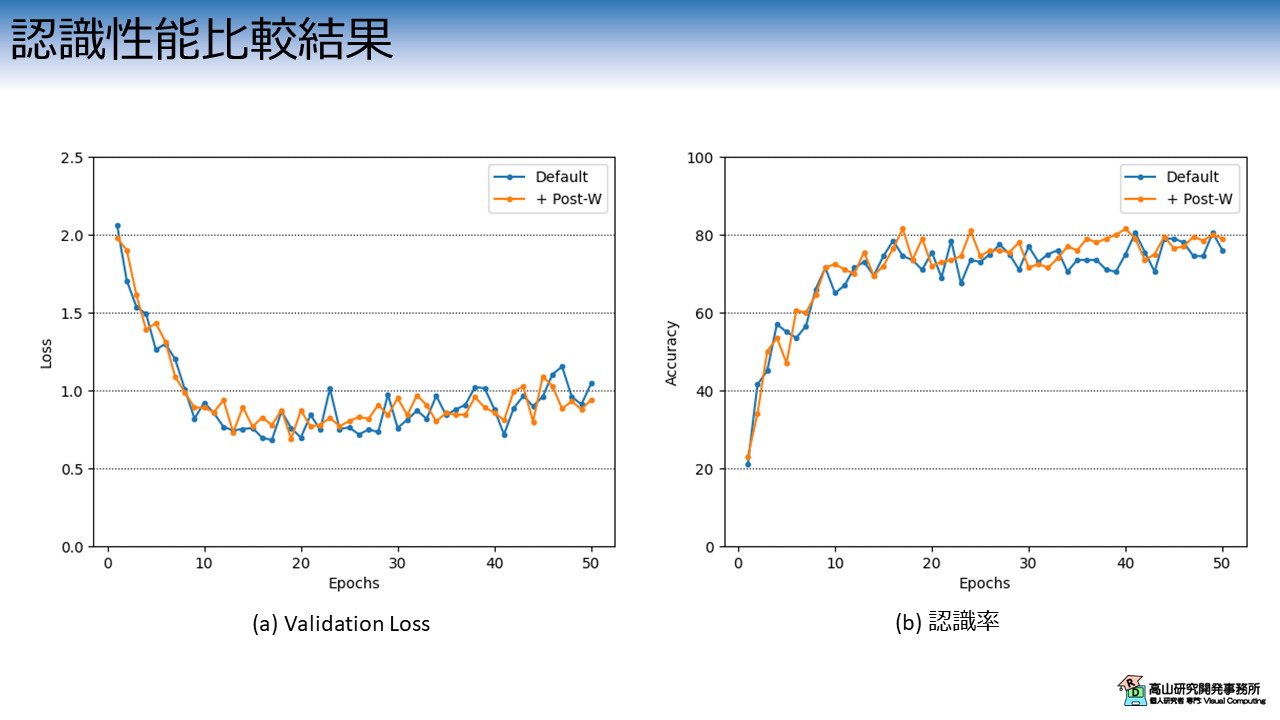
横軸は学習・評価ループの繰り返し数 (Epoch) を示します.
縦軸はそれぞれの評価指標を示します.
各線の色と実験条件の関係は次のとおりです.
- 青線 (Default): Pre-LN構成のTransformer
- 橙線 (+ Post-W): 正規化後に全身にノイズを付加
デフォルトのモデルには,第九回の記事で紹介した,Pre-LN構成のTransformerモデルを用います.
ノイズ付加処理の実装ではアフィン変換 の時と同様に,下記のようなオプションが考えられます.
- ノイズ付加のタイミング: 正規化前,正規化後
- ノイズを生成する分布: 一様分布,ガウス分布
- ノイズスケールの算出方法: 与えた値をそのまま用いる,追跡点を囲む矩形に対する相対値
- ノイズの与え方: 全身に同じパラメータ,部位毎に異なるパラメータ
予備実験では色々と試してみましたが結果に大きな違いはなかったので,図4では正規化後に全身にノイズを付加した場合の結果だけを示しています.
青線と橙線の比較結果から分かるとおり,ロス,認識性能共に大きな違いは出ませんでしたね...(^^;).
(図3の特徴マップで示された結果からある程度予想できてましたが...)
なお,今回の実験では話を簡単にするために,実験条件以外のパラメータは固定にし,乱数の制御もしていません.
必ずしも同様の結果になるわけではないので,ご了承ください.
2. 前準備
2.1 データセットのダウンロード
ここからは実装方法の説明をしていきます.
まずは,前準備としてGoogle Colabにデータセットをアップロードします.
ここの工程はこれまでの記事と同じですので,既に行ったことのある方は第2.3項まで飛ばしていただいて構いません.
まず最初に,データセットの格納先からデータをダウンロードし,ご自分のGoogle driveへアップロードしてください.
次のコードでGoogle driveをColabへマウントします.
Google Driveのマウント方法については,補足記事にも記載してあります.
1 2 3 | |
ドライブ内のファイルをColabへコピーします.
パスはアップロード先を設定する必要があります.
# Copy to local.
!cp [path_to_dataset]/gislr_dataset_top10.zip gislr_top10.zip
データセットはZIP形式になっているので unzip コマンドで解凍します.
!unzip gislr_top10.zip
Archive: gislr_top10.zip
creating: dataset_top10/
inflating: dataset_top10/16069.hdf5
...
inflating: dataset_top10/sign_to_prediction_index_map.json
成功すると dataset_top10 以下にデータが解凍されます.
HDF5ファイルはデータ本体で,手話者毎にファイルが別れています.
JSONファイルは辞書ファイルで,TXTファイルは本データセットのライセンスです.
!ls dataset_top10
16069.hdf5 25571.hdf5 29302.hdf5 36257.hdf5 49445.hdf5 62590.hdf5
18796.hdf5 26734.hdf5 30680.hdf5 37055.hdf5 53618.hdf5 LICENSE.txt
2044.hdf5 27610.hdf5 32319.hdf5 37779.hdf5 55372.hdf5 sign_to_prediction_index_map.json
22343.hdf5 28656.hdf5 34503.hdf5 4718.hdf5 61333.hdf5
単語辞書には単語名と数値の関係が10単語分定義されています.
!cat dataset_top10/sign_to_prediction_index_map.json
{
"listen": 0,
"look": 1,
"shhh": 2,
"donkey": 3,
"mouse": 4,
"duck": 5,
"uncle": 6,
"hear": 7,
"pretend": 8,
"cow": 9
}
ライセンスはオリジナルと同様に,CC-BY 4.0 としています.
!cat dataset_top10/LICENSE.txt
The dataset provided by Natsuki Takayama (Takayama Research and Development Office) is licensed under CC-BY 4.0.
Author: Copyright 2024 Natsuki Takayama
Title: GISLR Top 10 dataset
Original licenser: Deaf Professional Arts Network and the Georgia Institute of Technology
Modification
- Extract 10 most frequent words.
- Packaged into HDF5 format.
次のコードでサンプルを確認します.
サンプルは辞書型のようにキーバリュー形式で保存されており,下記のように階層化されています.
- サンプルID (トップ階層のKey)
|- feature: 入力特徴量で `[C(=3), T, J(=543)]` 形状.C,T,Jは,それぞれ特徴次元,フレーム数,追跡点数です.
|- token: 単語ラベル値で `[1]` 形状.0から9の数値です.
1 2 3 4 5 6 7 8 9 | |
['1109479272', '11121526', ..., '976754415']
<KeysViewHDF5 ['feature', 'token']>
(3, 23, 543)
[1]
2.2 モジュールのダウンロード
次に,過去の記事で実装したコードをダウンロードします.
本項は前回までに紹介した内容と同じですので,飛ばしていただいても構いません.
コードはGithubのsrc/modules_gislrにアップしてあります (今後の記事で使用するコードも含まれています).
まず,下記のコマンドでレポジトリをダウンロードします.
(目的のディレクトリだけダウンロードする方法はまだ調査中です(^^;))
!wget https://github.com/takayama-rado/trado_samples/archive/master.zip
--2024-01-21 11:01:47-- https://github.com/takayama-rado/trado_samples/archive/master.zip
Resolving github.com (github.com)... 140.82.112.3
...
2024-01-21 11:01:51 (19.4 MB/s) - ‘master.zip’ saved [75710869]
ダウンロードしたリポジトリを解凍します.
!unzip -o master.zip -d master
Archive: master.zip
641b06a0ca7f5430a945a53b4825e22b5f3b8eb6
creating: master/trado_samples-main/
inflating: master/trado_samples-main/.gitignore
...
モジュールのディレクトリをカレントディレクトリに移動します.
!mv master/trado_samples-main/src/modules_gislr .
他のファイルは不要なので削除します.
!rm -rf master master.zip gislr_top10.zip
!ls
dataset_top10 drive modules_gislr sample_data
2.3 モジュールのロード
主要な処理の実装に先立って,下記のコードでモジュールをロードします.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 | |
【コード解説】
- 標準モジュール
- copy: データコピーライブラリ.Transformerブロック内でEncoder層をコピーするために使用します.
- json: JSONファイル制御ライブラリ.辞書ファイルのロードに使用します.
- math: 数学計算処理ライブラリ
- os: システム処理ライブラリ
- random: ランダム値生成ライブラリ
- sys: Pythonインタプリタの制御ライブラリ.
今回はローカルモジュールに対してパスを通すために使用します.
- functools: 関数オブジェクトを操作するためのライブラリ.
今回はDataLoaderクラスに渡すパディング関数に対して設定値をセットするために使用します.
- inspect.signature: オブジェクトの情報取得ライブラリ.
- pathlib.Path: オブジェクト指向のファイルシステム機能.
主にファイルアクセスに使います.osモジュールを使っても同様の処理は可能です.
高山の好みでこちらのモジュールを使っています(^^;).
- typing: 関数などに型アノテーションを行う機能.
ここでは型を忘れやすい関数に付けていますが,本来は全てアノテーションをした方が良いでしょう(^^;).
- 3rdパーティモジュール
- numpy: 行列演算ライブラリ
- torch: ニューラルネットワークライブラリ
- torchvision: PyTorchと親和性が高い画像処理ライブラリ.
今回はDatasetクラスに与える前処理をパッケージするために用います.
- ローカルモジュール: sys.pathにパスを追加することでロード可能
- dataset: データセット操作用モジュール
- defines: 各部位の追跡点,追跡点間の接続関係,およびそれらへのアクセス処理を
定義したモジュール
- layers: ニューラルネットワークのモデルやレイヤモジュール
- transforms: 入出力変換処理モジュール
- train_functions: 学習・評価処理モジュール
3. ノイズ付加処理の実装
ノイズ付加処理の実装は下記のようになります.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 | |
【コード解説】
- 引数
- apply_ratio: データ拡張の適用確率.
- scale_range: ノイズスケールの範囲.
2要素の配列で `(min, max)` のように指定します.
`scale_range` の範囲でランダムにノイズスケール値を算出します.
ただし,`scale_unit="box_ratio"` の場合は,`target_joints`を囲む矩形の
対角線長を算出し,その長さに対する相対値に変換します.
- scale_unit: ノイズスケールの算出方法を指定.
- asis: `scale_range` の範囲でランダムに値を取り出し,そのまま使用します.
- box_ratio: `target_joints`を囲む矩形の対角線長を算出し,`scale_range` を
対角線長に対する相対値として見なして変換します.
- noise_type: ノイズを生成する分布を指定.
- uniform: 一様分布を用います.値は `(-scale, scale)` の範囲で取り出します.
- gauss: ガウス分布を用います.値は平均0, 標準偏差 `scale` の分布から
取り出します.
- target_joints: 変換を適用する追跡点インデクス.
部位毎に適用する場合は,ここの設定を変えたインスタンスを部位毎に生成する
必要があります.
- feature_dim: 特徴量の次元数
- include_conf: Trueの場合,特徴量の末尾は信頼度の次元であるとみなし,
処理を行います.
- 10-17行目: 初期化処理
- 19-69行目: ノイズ付加処理
- 22-23行目: 乱数を生成し,`apply_ratio` 以上だった場合は何もせずに値を返す
- 27-31行目: 信頼度にノイズが入らないように,配列を分離
- 34行目: `target_joints` で指定した追跡点を抽出
- 36-43行目: 追跡失敗フレームにノイズが入らないように,マスクを生成
- 46-52行目: `scale_unit == "box_ratio"` の場合は,`scale_range` を変換
- 55行目: ノイズスケールを算出
- 56-59行目: 指定した分布でノイズを付加
- 62行目: マスクの適用
- 63-69行目: 特徴量を整形し返す
- 71-72行目: print()に対して,クラス名と設定値を返す
4. 認識モデルの動作確認
今回は,第九回の記事で紹介した,Pre-LN構成のTransformerモデルをそのまま用いて実験を行います.
ここではモデルの推論動作が正常に動くかだけ確かめます.
次のコードでデータセットからHDF5ファイルとJSONファイルのパスを読み込みます.
1 2 3 4 5 6 7 8 | |
dataset_top10/sign_to_prediction_index_map.json
[PosixPath('dataset_top10/2044.hdf5'), PosixPath('dataset_top10/32319.hdf5'), PosixPath('dataset_top10/18796.hdf5'), PosixPath('dataset_top10/36257.hdf5'), PosixPath('dataset_top10/62590.hdf5'), PosixPath('dataset_top10/16069.hdf5'), PosixPath('dataset_top10/29302.hdf5'), PosixPath('dataset_top10/34503.hdf5'), PosixPath('dataset_top10/37055.hdf5'), PosixPath('dataset_top10/37779.hdf5'), PosixPath('dataset_top10/27610.hdf5'), PosixPath('dataset_top10/53618.hdf5'), PosixPath('dataset_top10/49445.hdf5'), PosixPath('dataset_top10/30680.hdf5'), PosixPath('dataset_top10/22343.hdf5'), PosixPath('dataset_top10/55372.hdf5'), PosixPath('dataset_top10/26734.hdf5'), PosixPath('dataset_top10/28656.hdf5'), PosixPath('dataset_top10/61333.hdf5'), PosixPath('dataset_top10/4718.hdf5'), PosixPath('dataset_top10/25571.hdf5')]
次のコードで辞書ファイルをロードして,認識対象の単語数を格納します.
1 2 3 4 5 | |
次のコードで前処理を定義します.
固定の前処理には,以前に説明した追跡点の選定と,追跡点の正規化を適用して実験を行います.
第1.3項で述べたとおり,ノイズ付加処理の適用の仕方はいくつか考えられます.
今回は下記のように実装しました.
- ノイズ付加のタイミング: 正規化後
- ノイズを生成する分布: 一様分布
- ノイズスケールの算出方法: 与えた値をそのまま用いる
- ノイズの与え方: 全身に同じパラメータ
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 | |
次のコードで,前処理を適用したHDF5DatasetとDataLoaderをインスタンス化し,データを取り出します.
HDF5Dataset をインスタンス化する際に,transforms 引数に transforms_w_daug を渡してデータ拡張を有効にしています (10行目).
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 | |
torch.Size([2, 2, 75, 130])
次のコードでモデルをインスタンス化して,動作チェックをします.
追跡点抽出の結果,入力追跡点数は130で,各追跡点はXY座標値を持っていますので,入力次元数は260になります.
出力次元数は単語数なので10になります.
また,Transformer層の入力次元数は64に設定し,PFFN内部の拡張次元数は256に設定しています.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 | |
TransformerEnISLR(
(linear): Linear(in_features=260, out_features=64, bias=True)
(activation): ReLU()
(tr_encoder): TransformerEncoder(
(pos_encoder): PositionalEncoding(
(dropout): Dropout(p=0.1, inplace=False)
)
(layers): ModuleList(
(0-1): 2 x TransformerEncoderLayer(
(self_attn): MultiheadAttention(
(w_key): Linear(in_features=64, out_features=64, bias=True)
(w_value): Linear(in_features=64, out_features=64, bias=True)
(w_query): Linear(in_features=64, out_features=64, bias=True)
(w_out): Linear(in_features=64, out_features=64, bias=True)
(dropout_attn): Dropout(p=0.1, inplace=False)
)
(ffw): PositionwiseFeedForward(
(w_1): Linear(in_features=64, out_features=256, bias=True)
(w_2): Linear(in_features=256, out_features=64, bias=True)
(dropout): Dropout(p=0.1, inplace=False)
(activation): ReLU()
)
(dropout): Dropout(p=0.1, inplace=False)
(norm1): LayerNorm((64,), eps=1e-05, elementwise_affine=True)
(norm2): LayerNorm((64,), eps=1e-05, elementwise_affine=True)
)
)
(norm): LayerNorm((64,), eps=1e-05, elementwise_affine=True)
)
(head): GPoolRecognitionHead(
(head): Linear(in_features=64, out_features=10, bias=True)
)
)
torch.Size([2, 10])
(2, 2, 75, 75) (2, 2, 75, 75)
5. 学習と評価の実行
5.1 共通設定
では,実際に学習・評価を行います.
まずは,実験全体で共通して用いる設定値を次のコードで実装します.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 | |
Using 2 cores for data loading.
Using cuda for computation.
5.2 学習・評価の実行
次のコードで学習・バリデーション・評価処理それぞれのためのDataLoaderクラスを作成します.
今回は,ノイズ付加処理の有無に寄る認識性能の違いを見たいので,実験毎にデータセットクラスをインスタンス化します.
1 2 3 4 5 6 7 8 9 10 11 | |
次のコードでモデルをインスタンス化します.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 | |
TransformerEnISLR(
(linear): Linear(in_features=260, out_features=64, bias=True)
(activation): ReLU()
(tr_encoder): TransformerEncoder(
(pos_encoder): PositionalEncoding(
(dropout): Dropout(p=0.1, inplace=False)
)
(layers): ModuleList(
(0-1): 2 x TransformerEncoderLayer(
(self_attn): MultiheadAttention(
(w_key): Linear(in_features=64, out_features=64, bias=True)
(w_value): Linear(in_features=64, out_features=64, bias=True)
(w_query): Linear(in_features=64, out_features=64, bias=True)
(w_out): Linear(in_features=64, out_features=64, bias=True)
(dropout_attn): Dropout(p=0.1, inplace=False)
)
(ffw): PositionwiseFeedForward(
(w_1): Linear(in_features=64, out_features=256, bias=True)
(w_2): Linear(in_features=256, out_features=64, bias=True)
(dropout): Dropout(p=0.1, inplace=False)
(activation): ReLU()
)
(dropout): Dropout(p=0.1, inplace=False)
(norm1): LayerNorm((64,), eps=1e-05, elementwise_affine=True)
(norm2): LayerNorm((64,), eps=1e-05, elementwise_affine=True)
)
)
(norm): LayerNorm((64,), eps=1e-05, elementwise_affine=True)
)
(head): GPoolRecognitionHead(
(head): Linear(in_features=64, out_features=10, bias=True)
)
)
次のコードで学習・評価処理を行います.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 | |
Start training.
--------------------------------------------------------------------------------
Epoch 1
Start training.
loss:5.576330 [ 0/ 3881]
loss:2.114927 [ 3200/ 3881]
Done. Time:4.197936325000001
Training performance:
Avg loss:2.244976
Start validation.
Done. Time:0.23507754099998124
Validation performance:
Avg loss:2.062455
Start evaluation.
Done. Time:1.478748118999988
Test performance:
Accuracy:21.0%
--------------------------------------------------------------------------------
...
--------------------------------------------------------------------------------
Epoch 50
Start training.
loss:0.365383 [ 0/ 3881]
loss:0.126034 [ 3200/ 3881]
Done. Time:4.363397716000009
Training performance:
Avg loss:0.181445
Start validation.
Done. Time:0.38183034599995835
Validation performance:
Avg loss:1.044114
Start evaluation.
Done. Time:1.152390577999995
Test performance:
Accuracy:76.0%
Minimum validation loss:0.6803945899009705 at 17 epoch.
Maximum accuracy:80.5 at 41 epoch.
以後,同様の処理を設定毎に繰り返します.
コード構成は同じですので,ここでは説明を割愛させていただきます.
また,この後グラフ等の描画も行っておりますが,本記事の主要点ではないため説明を割愛させていただきます.
5.3 実験結果
認識性能の比較結果を図5に示します.
こちらは図4の再掲図です.
横軸は学習・評価ループの繰り返し数 (Epoch) を示します.
縦軸はそれぞれの評価指標を示します.
各線の色と実験条件の関係は次のとおりです.
- 青線 (Default): Pre-LN構成のTransformer
- 橙線 (+ Post-W): 正規化後に全身にノイズを付加
デフォルトのモデルには,第九回の記事で紹介した,Pre-LN構成のTransformerモデルを用います.
青線と橙線の比較結果から分かるとおり,ロス,認識性能共に大きな違いは出ませんでしたね...(^^;).
(図3の特徴マップで示された結果からある程度予想できてましたが...)
ただし今回は劣化したデータを学習させていることを考えると,認識性能を保てているという解釈もできるかもしれません.
今回は追跡点系列に対してノイズを加えて,データ拡張を行う手法を紹介しましたが,如何でしたでしょうか?
ノイズを加えた場合に特性があまり変わらなかったので,解釈に時間がかかってしまいました(^^;)
今回使用したデータセットでは試せませんでしたが,オリジナルの動画がある場合は,ノイズが起きやすい環境や追跡モデルを使用したデータをテストデータとすることで,ノイズに対する頑健性を検証することができます.
他にも,テストデータにノイズを加えて検証をしてみるのも面白いかも知れませんね.
機会があれば試してみたいと思います.
今回紹介した話が,これから手話認識を勉強してみようとお考えの方に何か参考になれば幸いです.
